立體倉(cāng)庫(kù)堆垛機(jī)的工作原理
作者: 本站 來(lái)源: 本站 時(shí)間:2021年11月19日
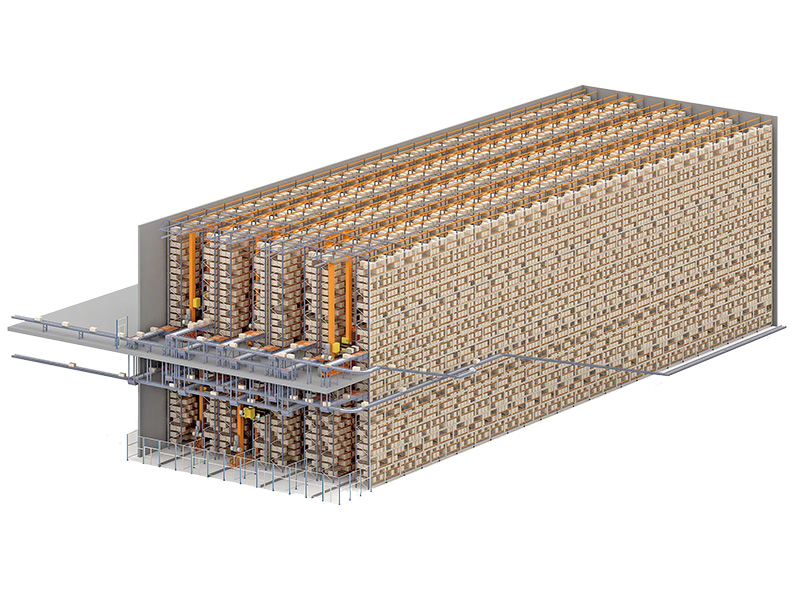
今年來(lái)�,隨著現(xiàn)代物流在世界各地的興起�����,現(xiàn)代工業(yè)的快速發(fā)展和日益激烈的市場(chǎng)競(jìng)爭(zhēng)會(huì)對(duì)立體倉(cāng)庫(kù)提出更高的要求��,而堆垛機(jī)是整個(gè)自動(dòng)化立體倉(cāng)庫(kù)的核心部件��。立體倉(cāng)庫(kù)堆垛機(jī)可通過(guò)手動(dòng)操作��,半自動(dòng)操作和全自動(dòng)操作實(shí)現(xiàn)貨物從一處搬運(yùn)到另一處���,擔(dān)負(fù)著出/入庫(kù)�����、盤(pán)點(diǎn)庫(kù)存等任務(wù)��。自動(dòng)化立體倉(cāng)庫(kù)的發(fā)展就是以堆垛機(jī)的發(fā)展為主要標(biāo)志的����,目前巷道式堆垛機(jī)為主要發(fā)展方向�。
立體倉(cāng)庫(kù)堆垛機(jī)的工作原理:
堆垛機(jī)由行走電機(jī)通過(guò)驅(qū)動(dòng)軸帶動(dòng)車(chē)輪在下導(dǎo)軌上做水平行走,由提升電機(jī)通過(guò)鋼絲繩帶動(dòng)載貨臺(tái)做垂直升降運(yùn)動(dòng)�,由載貨臺(tái)上的貨叉做伸縮運(yùn)動(dòng)。通過(guò)上述三維運(yùn)動(dòng)可將指定貨位的貨物取出或?qū)⒇浳锼腿胫付ㄘ浳?��。行走認(rèn)址器用于測(cè)量堆垛機(jī)水平行走位置�;提升認(rèn)址器用于控制載貨臺(tái)升降位置����;貨叉方向使用接近開(kāi)關(guān)定位。通過(guò)光電識(shí)別����,以及光通訊信號(hào)的轉(zhuǎn)化,實(shí)現(xiàn)計(jì)算機(jī)控制����,也可實(shí)現(xiàn)堆垛機(jī)控制柜的手動(dòng)和半自動(dòng)控制。同時(shí)采用優(yōu)化的調(diào)速方法�����,減少堆垛機(jī)減速及停機(jī)時(shí)的沖擊�����,大大縮短堆垛機(jī)的起動(dòng)���、停止的緩沖距離����,提高了堆垛機(jī)的運(yùn)行效率���。
庫(kù)堆垛機(jī)")
立體倉(cāng)庫(kù)堆垛機(jī)的結(jié)構(gòu):
堆垛機(jī)主要由上橫梁��、下橫梁���、載貨臺(tái)�、立柱�、水平運(yùn)行機(jī)構(gòu)、起升機(jī)構(gòu)�、貨叉機(jī)構(gòu)、安全保護(hù)裝置�、電控柜和電氣控制系統(tǒng)等幾大部分組成。
推薦閱讀
穿梭車(chē)自動(dòng)化立體倉(cāng)庫(kù)系統(tǒng)優(yōu)勢(shì)與特點(diǎn)
如何讓自動(dòng)化立體倉(cāng)庫(kù)布局更加高效���?
如何讓自動(dòng)化立體倉(cāng)庫(kù)布局更加高效��?
介紹")
品中心")


系我們")